 Mixing
Mixing
二足歩行ロボット
この記事には複数の問題があります。改善やノートページでの議論にご協力ください。
|
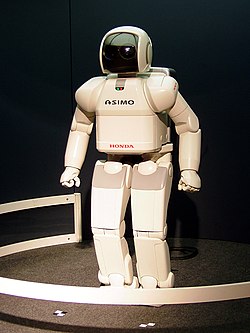
ASIMO
二足歩行ロボット(にそくほこうロボット、Biped walking robotまたはBiped robot)とは、ロボットの中でも、人間のように二本足でバランスをとりながら歩くものをいう。特に人間と同様の形状をしているロボットをヒューマノイドと呼ぶが、ヒューマノイド全てが二足歩行ロボットであるとは限らない。
足(脚)とは回転機構で繋がった2つ以上のリンクで構成されたシリアルリンク機構で、二足歩行ロボットは脚を二つ持つ。世界初の二足歩行ロボットは1969年に早稲田大学の加藤一郎教授によって開発されたWAP-1である。1996年12月に発表されたホンダのP-2(後のASIMO)は人々に大きな衝撃を与えた。
[1][2][3]
目次
1 二足歩行ロボット研究の目的
1.1 二足歩行ロボット研究と文化的背景
1.2 産業化
1.3 応用
2 二足歩行ロボットの歴史
2.1 倒立振子からパターン歩行
2.2 ZMP
2.3 上半身の発見
2.4 WABOT
2.5 ASIMO
2.6 ASIMO以後
3 二足歩行ロボットのしくみ
3.1 二足歩行ロボットとは
3.2 歩行とは何か
3.2.1 静歩行
3.2.2 動歩行
3.2.3 ZMP
3.2.4 パッシブウォーキング
3.2.5 歩様
3.3 制御モデル
3.4 ヒト型モデル
3.5 無質量脚モデル
3.6 トリ型モデル
3.7 恐竜型モデル
3.8 歩行の生成
3.8.1 歩行パターンによる歩行制御
3.8.2 歩行パターンを用いない歩行制御
4 二足歩行ロボットのハードウエア
4.1 フレーム
4.2 アクチュエータ
5 ロボット競技大会
6 主な二足歩行ロボット
7 関連項目
8 脚注
9 出典
10 外部リンク
二足歩行ロボット研究の目的

茶運び人形、大英博物館
二足歩行ロボットは、主に人間の活動を前提とした空間で、ロボットが支障なく移動し作業することを目的に研究されている。
[4][5][6]
また、自動車のペダル、自転車のペダル、足踏み式空気入れなど、ユーザーインタフェースとしての人間の足を前提とした機械をロボットに動作させることを目的としているケースもある。初期の二足歩行ロボットにおいては、人間の二足歩行というメカニズムを工学的な視点より研究・解明する目的で製作されたものもある。
二足歩行以外には、産業用の組立てロボットのように移動手段を持たないものや、地上(車輪、キャタピラ、蛇のような多関節構造、4脚、6脚)、水中(無人潜水艇)、空中(無人飛行機)、宇宙(無人探査機)などの移動手段がある。
二足歩行ロボット研究と文化的背景
ロボットの語源はチェコの作家カレル・チャペックの『RUR』という1921年に出版されたSF小説に出てきたロボットという名の人造人間である。この小説ではロボットは奴隷として描かれており、ある日人間に反抗し人間の殺戮を開始する、というストーリーである。原典での描写に従えば、ロボットとは人間に危害を加える人造人間の奴隷ということになる。ハリウッド映画に出てくるロボットの多くが、この原典でのイメージを引き継いでいるのは理解できるだろう。
また、英語、ドイツ語、スラブ語派などでは、rob-はいい意味の綴りではないことも、文化的背景としては留意すべき事項である。(例 英語 robber:強盗、泥棒、加害者 rob:奪う、スラブ語派 強奪する раб:奴隷 работа:労働)
日本におけるロボット研究においては、からくりとの文化的なつながりが複数の識者により指摘がされている[7]。また、『鉄腕アトム』や『ドラえもん』といった漫画・アニメ作品で描かれたような、人間と共に、また人間と同じように活動するロボットへのあこがれが、日本でヒューマノイドや二足歩行ロボットの研究が盛んである理由の一つとの指摘する人も多い[8]。実際、そのような意見を述べるロボット研究者は少なくない[9]。
産業化
二足歩行ロボットは、以前から日本の技術の高さと独自性が内外から評価されつつも、未だ産業化とは程遠い状況である。二足歩行ロボットのような新技術の実用化には、天才による画期的な発想ではなく、失敗を繰り返しそれに学ぶ地道な改良が必要で、大規模な資本投下と足の長い開発が欠かせない。[10]
最も実用化が有望なのは、人間が入れない作業空間ということで、原子力産業への適用は以前から提案がされていた。[11] しかし、事故の想定を嫌う原子力サイドの対応は極めて消極的であった。話題性や新規性ばかり追い続け、需要に対して受身だった研究者や企業の姿勢にも問題が無かったとは言えない。
[12]
数々の原発事故や災害において、日本の歩行ロボット技術は何ひとつ貢献することは無かった。[13][14][15]
応用
HRP-2を開発した川田工業は無人ヘリコプターの開発で獲た制御技術を応用しているなど、航空機の制御技術とは密接な関わりがある[16]。
二足歩行ロボットの制御技術はパーソナルモビリティやパワードスーツとも共通し、例としてホンダのU3-Xや体重支持型歩行アシストはASIMOの制御技術を応用している。
二足歩行ロボットの歴史
倒立振子からパターン歩行

倒立振子
二足歩行ロボットが工学の研究対象となったのは1970年頃からである。当初は倒立振子(とうりつしんし、en:Inverted pendulum)の延長上の技術として考えられており、その方面からの研究アプローチが盛んに行われた。倒立振子とはスライダ(直動機構)上に逆さに置いた振子の制御モデルのことである。振子が倒れないようにスライダを制御する。これはPID制御で比較的簡単に倒れないように制御することができた。2重倒立振子、3重倒立振子も成功例が報告された。人間の足は4重倒立振子モデルとして考えることもできるので、倒立振子モデルを研究していけば、いずれ2足歩行の制御が可能になると考えられていたのである。
人間の足に見立てた4重倒立振子モデルを、歩行になるような拘束条件を与え運動方程式を解くと、各関節の制御量が得られる。この動作(歩行パターンという)を実際のロボットに入力して動かせば、理論的にはロボットは歩くはずである。当時の計算機の能力からリアルタイムで歩行パターンを生成することが出来なかったので、あらかじめ歩行パターンを計算しておいた。それゆえ、この歩行制御法はパターン歩行と呼ばれた。
しかし、結論から言えばこの方法は失敗に終わった。簡単に言えば当時のモーターや構造材が貧弱で、実際に動かすと理論と現実の相違が激しかったのである。ロボットの状態をリアルタイムで検知し、ある拘束条件のもとにフィードバックする必要があった。
ZMP
1980年頃からさまざまな拘束条件や制御方法、ハードウエアが研究されたが、その後主流になったのはZMPを軌範とする歩行である。
ZMP理論に基づく2足動歩行は早稲田大学の加藤一郎と高西淳夫によって開発されたWL-10RDにより、1985年に実現された。早稲田大学のグループを除くと、1970年代から1990年代半ばまでZMPはあまり注目されていたわけではない。しかし、今日ではホンダのASIMOをはじめ完成度の高い2足歩行ロボットのほぼ全てが、ZMPを用いた軌道生成と制御を用いている。
上半身の発見
ロボットの研究が進み、アクチュエータや構造材が進歩しても、人間のような歩行を行うロボットはなかなか実現しなかった。人間の歩行の研究やロボットの歩行実験が繰り返されていくうちに、上半身の作用が極めて重要であることが再認識されてきたのである。
当時の歩行ロボットは人間の腰から下を模倣したものがほとんどで上半身は省略されていた。上半身の重要性はZMP理論の提唱者であるブコブラトビッチ(Miomir Vukobratović)の時代から指摘されていたが、当時のモーターや減速機は貧弱だったので脚機構以外の部分が極力省略されることが多かった。
パターン歩行にしてもZMPにしても位置制御が基本となるので、足首にもアクチュエータが必要になる。そのため末端重量が大きくなり、各関節のアクチュエータは強力で大きなものにならざるを得ない。構造材も当然重くなる。腰から下だけのロボットが片足を持ち上げると、それだけでロボットの質量の半分以上が動くことになる。したがって歩行時の重心の位置変化が激しく、安定領域の狭い制御の難しい制御系になっていた。ブルブルと振動を起こして転倒するロボットが大半であった。
また、末端重量が大きいので、遊脚を振り上げたときの反動が無視できなかった。遊脚を持ち上げてから蹴り下げ始める時に、スキーで言う抜重のような状態になり、軸足の床面との摩擦が少なくなる。摩擦が少なくなると軸足が滑り易くなる。パターン歩行にしてもZMPにしても軸足が動くというのは想定外であるし、想定したとしても検出できるセンサーがない。軸足が少しでも滑るとあっという間に転倒してしまった。重たい脚を動かすには、上半身の動作で常に動的バランスを補償する必要があったのである(なお、アクチュエータの性能が良くなった現代では上半身が無くても歩行は実現できる)。
WABOT
早稲田大学理工学部の加藤一郎が率いた研究グループは二足歩行ロボット研究の草分け的存在であった。1960年代からロボットの研究を始め、製作したロボットにWABOTという愛称を付けている。1985年に、WABOTの11号機である、WL-11でヒト型二足ロボットでパターン歩行で動歩行を実現した。1.5秒/ステップのゆっくりとした歩行である。歩行を始めるとき、制御装置を積んだ大きな太鼓腹が音を立てて傾くのが印象的であった。はじめから意図したのか不明だが、上体の動作で遊脚の反動を打ち消していたのだろう。
1986年、この研究グループが、より積極的に上半身の作用を利用するために、上半身に見立てた大きな重りを二足歩行ロボットの腰部の上に取り付けた上体補償型二足歩行ロボットWL-12を製作した。重りはダンベルの様なもので、前後左右に振ることが出来た。見た目はともかく、そのロボットは非常に滑らかな歩行を実現した。階段も昇り降りすることが出来た。この研究成果により、二足歩行ロボットの歩行には上半身の働きが極めて重要であることが証明され、それ以降開発される二足歩行ロボットには上半身が付くことが主流になっていく。
ASIMO
1996年、自動車メーカーのホンダがヒト型ロボットP-2を発表した。何よりもそのシステムとしての完成度の高さに当時の研究者は驚かされた。まず、外部につながるケーブルが無く、自律制御が可能だった。視覚センサを持ちマークで示した経路を自分で判断して歩くことが出来た。しかも、腕に見立てたマニピュレータを持ち人間の姿に似ていた、などの点が斬新であった。ホンダが二足歩行ロボットの研究を行っていたことは特許公報などで断片的に知られていたが、これほど本格的に行っていることは知られていなかった。そのためP-2の発表は研究者たちにも一般社会にも非常に大きなインパクトを与えた。これ以降歩行ロボットの研究が一気に一般化し、さまざまな企業が二足歩行ロボットの研究に乗り出す。その後、ホンダのロボットはASIMOと名付けられ、商品化された。2005年12月、ASIMOの新型において時速6km、跳躍時間 0.08秒の走行を実現させた。歩行から走行を同じロボットで実現した点で世界初である(走行だけを行うロボットなら1980年代から存在する)。
ASIMO以後
ASIMO以外でも二足歩行ロボットによる走行が研究されてきている。走行の場合、着地の際の衝撃が歩行と比べて大きいため、衝撃緩和技術が重要になる。また、両足が地面から離れるため、その間の姿勢制御は無重量状態の姿勢制御と同様の技術が必要になる。より進んだ活動を行うためには、周辺の状況を適切に認識し、以後の状況を予測し判断する能力も必要となる。段差や障害物を認識しそれを見越した行動を取ったり、人間や他のロボットの行動や指示などを認識しなければならない。カメラによる画像認識や音声認識などの技術も二足歩行ロボットにとって重要な技術となる。現在では歩行制御の研究は一段落した感があり、二足歩行ロボットの研究の中心はヒューマノイドとしての統合システムの研究へ移行しつつある。
二足歩行ロボットのしくみ
二足歩行ロボットとは
二足歩行ロボットとは脚を2つ持ち、歩行を行うロボットのことである。ロボットは節(リンク)と関節(ジョイント)で構成されるリンク機構で、関節はモーターなどのアクチュエータで駆動される。リンクとは剛体の構造物のことで、ジョイントは回転機構または直動機構のことである。足(脚)とは回転機構で繋がった2つ以上のリンクで構成されたシリアルリンク機構である。直動機構(スライダ)で脚を構成するロボットもあるが、これを二足歩行ロボットに含めるかは研究者により定義が分かれる。
研究者によって違うが、ロボットの構造は概して次のように定義されている。まず足首に相当する関節を第1関節、膝に相当する第2関節という。股関節は第3関節ということになるが胴体に接続する関節は慣例的にロボットでも股関節という。また、足裏を含む部分を第1節、脛に相当する部分を第2節、大腿に相当する部分を第3節という。腰や胴に相当する部分は慣例的にロボットでも胴体と言うことが多い。上半身の形態には様々なバリエーションがあり、腕のあるもの、頭の無いもの色々で、これといって代表的なものは無い。
歩行とは何か
歩行とは脚の運動による移動方法の一種である。体重のかかる方の脚を軸脚(ピボット、あるいはピボット脚とも言う)、振り上げている方の脚を遊脚と言う。二足歩行は2本の脚を交互に軸足にして重心を任意の方向に移動する移動方法である。
静歩行
歩行の形態には静歩行と動歩行がある。静歩行とは重心の路面への投影点が左右いずれかの足の裏に位置するような歩行法である。静歩行の静は、静的安定の静のことである。静的に安定なのでどこで停止しても転倒することが無いが、床面が常に平面でなければならないなど環境に制約が多い。
静歩行は、安価なおもちゃでよく使われている。
動歩行
静歩行に対する概念として動歩行がある。動歩行は重心の路面への投影点が足の裏から外れる歩行方法のことである。人間などが行う歩行もこれに入る。動歩行の動は動的安定の動で、動的には安定だが静的には不安定という意味であり、運動量を打ち消してから歩行動作を停止しないと転倒してしまう。制御は難しいが、でこぼこ道など条件の悪い環境にも対応できる。
二足歩行ロボットの研究対象になっているのは主に動歩行である。動歩行の実現のためには、加速度や床からの反力などといった状況を的確に収集・判断し、これに対応し制御するための技術開発が必要になる。
ZMP

ZMPとは動力学的な重心位置のことで、ZMPが足裏上に来るような拘束条件を与えることで二足歩行が実現できる。上はZMPを視覚的に表現した図。左右同じ姿勢だが、左は安定、右は慣性力のためZMPが足裏から外れて不安定となっている。
動歩行を実現する方法としてZMPを規範とする歩行制御方法が主流となっている。規範とは、制御工学的に言えば境界条件と拘束条件の組み合わせのことで、ひらたく言えば規則とか法則というような意味あいである。
1972年、ユーゴスラビア(現セルビア共和国)のミハイロピューピン研究所のブコブラトビッチ(Miomir Vukobratović)らが、ゼロモーメントポイント(ZMP)と呼ばれる歩行規範に基づく2足歩行ロボットの軌道生成法と制御法を発表した。ZMPは床反力の圧力中心であり、ロボットの運動と運動方程式から計算することができる。ブコブラトビッチらは、支持多角形(Support polygon)内を運動するZMPの時間軌道を予め設定し、これに対応する歩行運動を繰り返し収束計算により求めた。ZMPを用いることにより、遊脚や上半身の質量による影響すべてを厳密に考慮した歩行運動を設計することができる。
ZMPとは動力学的な重心の投影点が安定域(≒足の裏のこと)に位置するような運動法則である。"動力学的な"ところが静歩行と異なるため、ZMPによる歩行は動歩行に分類される。しかし同じ動歩行といっても、ZMPによる歩行は、人間や動物の歩行と同じではない。ZMPによる歩行はエネルギー保存則とは無関係な運動法則なので、エネルギーの消耗が激しい。ヒトなどの生物は少ないエネルギーで長距離を歩行するが、ZMPではそれを説明できない。
パッシブウォーキング
100円ライターを机上に直立に置く。それから数度傾けて手を離すと数秒間コトコトと振動する。よく見ていると、少し移動していることもある。振動している間は、ライターの底の端の2点のみが机上に接して運動しているわけで、歩様(下記)としてはトロットに分類できる。また、静力学的にも動力学的にも重心の投影点は足裏には無く、完全な動歩行と定義することができる。これをパッシブウォーキング(受動歩行)という。パッシブウォーキングは、歩くおもちゃとして古くから応用されている。
[17]
パッシブウォーキングは動力学的には振り子運動と同じ振動の一種で、動的平衡状態にあると定義できる。
振動はポテンシャルエネルギーと運動エネルギーが交互に変換されるので、エネルギー保存則が保たれている。二足歩行を振動と考えれば、ヒトやペンギンが僅かなカロリーで長距離を歩行できる説明が付くため、自然界の二足歩行はこのパッシブウォーキングに近い運動であると考えられている。
歩様
歩行の体育学的な分類としては歩様(歩容、歩法と書く場合もある)による分類がある。二足歩行の歩様にはウォーク(常足、なみあし)、トロット(速歩、はやあし)、ギャロップなどがある。単に歩行と言った場合はトロットのことと考えて差し支えない。
トロットとは交互に軸足が切り替わり、常にどちらかの足が地面に付いている、跳躍期の無い歩き方のことを言う。軸足は瞬間的に入れ替わり、両方に体重がかかっている期間は無いか無視できるほど短いものとされる。トロット歩行の場合、歩行という一見複雑な運動を、軸足の接地点を回転中心とした回転運動として捉えることができ、運動方程式を比較的簡単に立てることができる。このため二足歩行ロボットではトロットを規範とする歩行制御が適用されるのが普通である。
歩行が回転運動だとすると遠心力が発生するはずである。このときの遠心力F{displaystyle F}



F=mv2r{displaystyle F={frac {mv^{2}}{r}}}

Fをmgと置き換えると、次の式が導かれる。g{displaystyle g}
v=gr{displaystyle v={sqrt {gr}}}

これは歩行の限界速度を表す式で、これより速い速度で歩行すると遠心力により自然に脚が床面から離れ、走行に移行することを意味している。人間の重心位置の高さを1mとすると歩行の限界速度は11.2km/hとなる(ちなみに競歩の世界記録は13.6km/h(50km)。腰の捻りや足裏のストロークなどが加わるため理論上の数値よりは大きくなる)。走行に至らないまでも、歩行速度が増すと遠心力により軸足が滑りやすくなり、歩行ロボットは転倒しやすくなる。
トロット歩行の場合、水平方向の運動量は理論的には次のステップへ100%伝達される。上下方向の運動量は床面との衝突により失われてしまうが、人間の場合、重心の位置エネルギーをアキレス腱が保存し、軸足交換時に体を蹴り上げて次のステップに伝えていると考えられている。
ウォークは、両脚に体重のかかる期間のある歩様のことである。この歩様では、両足が地面についていると重心の速度ベクトルの向きが一方向に拘束されてしまう。そのため、ステップごとに上下方向の運動量に加えて左右方向の運動量も失われる(重心の軌跡がジグザグになる)ので、エネルギーコストが著しく悪化する。それゆえ、人間や鳥ではあまり行われていない歩行と考えられている。また、2本脚のときと1本脚のときで運動モードが異なり制御が複雑になるので二足歩行ロボットでもあまり行われない。
ギャロップは跳躍期のある歩行で、いわゆる走行のことである。跳躍期とは2本とも脚が地面に付いていない時期のことである。
なお、ここでの歩行の定義は工学における定義の一例である。また、歩様の分類や名前の付け方には研究者により差がある。
制御モデル
制御工学では制御対象について考察するときには、数式化しやすいように制御対象を抽象化するが、抽象化された制御対象を制御モデル、あるいは単にモデルと言う。制御モデルが現物に近いほど精度の高い制御が可能になるのだが、制御モデルが複雑になると運動方程式が解けなくなるので、普通はなるべくシンプルなモデルが使われる。二足歩行ロボットではヒトやトリを抽象化した制御モデルが使われる。
ヒト型モデル

ヒト型二足歩行ロボットの制御モデル。円筒形はモーターの配置を表す。二足歩行ロボット研究の初期に多く見られた胴体の無いタイプ。脚の揺動の影響が大きく、歩行制御は困難だった。

胴体のあるヒト型二足歩行ロボットの制御モデル。現在のヒト型二足歩行ロボットでは多くがこのタイプ。ただし、図では脚を駆動するモーターが胴体に配置されているが、実際にこのようにモーターを配置されたロボットは無い。胴体にはバッテリーや制御装置が組み込まれる。
文字通りヒトの形に似せた制御モデル。直立二足歩行の制御モデルである。日本の二足歩行ロボット研究では主流のモデルとなっている。研究初期では上半身を省略した下半身だけのモデルが使われることが多かったが、上半身の歩行への作用が発見されてからは全身モデルが使われるのが一般的になった。
多くの二足歩行ロボットがZMPによる重心の位置と速度の制御により歩行を行うが、この場合どうしても足首トルクが必要になる。足首のアクチュエータにより末端重量が増加すると、安定領域が狭くなるうえに、歩行時の重心変動が激しくなり、著しく制御が困難になる。ヒト型ロボットでは上半身の動作により、重心変動を打ち消す、あるいは緩和することが出来る。
胴体はヒトに似せて、垂直に立った形になる。そのため胴体の重心位置は股関節よりかなり上に位置することになり、偏心モーメントを持っている。そのためロボットが歩行を始めると、その反動が胴体にモーメント力として伝わることになる。このモーメント力を床面まで伝えて打ち消す必要があるので、脚の各関節にはかなり強力なアクチュエータと大きな足裏が必要になる。ヒト型モデルは動的バランスを取るために足首トルクが必要なのである。人間の脚も鳥などと比べると太く頑丈なのも同じ理由からである。そのためヒト型モデルのロボットは頑丈なものになる傾向がある。大型のロボットでは高価なサーボモーターやハーモニックドライブなどが必要になり、製造コストが高い。
生物における直立二足歩行も胴体の重心位置が股関節の位置と一致せず、胴体から巨大なモーメント(回転力)が発生する。これを筋肉で抑えないといけないため、太い脚とそれを動かすための余分なエネルギーが必要となる。自然界で直立二足歩行があまり見られないのはエネルギー効率が悪いためであると考えられている。
無質量脚モデル

無質量脚モデル。脚に質量が無い理想的な二足歩行ロボットの制御モデル。
歩行ロボットを最も理想的な姿にしたのが無質量脚モデルで、理論上の制御モデルである。脚の質量はゼロで完全剛体。質量は全て胴体にあると仮定する。胴体の重心位置と股関節の位置は完全に一致する。したがって全身の重心位置も股関節と一致する。
無質量脚モデルだと脚の動作で重心が変動しない。さらに股関節と胴体の重心位置が一致しているのでモーメント力が発生せず、それを打ち消すためのトルクが必要なく、従って足首トルクも必要ない。床面への力と反動、重心位置だけを考えればいいため運動方程式が簡単で、アクチュエータの数も最小限なので制御も簡単である。1980年頃、歩行現象の理論化のために無質量脚モデルが盛んに研究された。
無質量脚モデルは最も歩行を実現しやすいモデルだが、現実に製作することはもちろん不可能である。しかしそれに近いロボットに関する研究例は多い。日本では竹馬型ロボットと呼ばれる二足歩行ロボットが1980年頃から研究されている。竹馬型ロボットは腰の部分に脚を動作させるアクチュエータを持つ。脚は軽くするために伸縮するタイプが多い。原理的に人間の足(足首から下)に相当する部分は必要無いのだが、傾きを検出するためにポテンショナのみを装備した足首を持つ。機構が単純で製作しやすく制御も容易なので、ロボットにおける動歩行の実現はこのタイプが最も早かった。1982年に東大の下山勲らが竹馬型ロボットによる動歩行について論文を発表している。
欧米ではホッピングロボットあるいはホッピングマシンと言われ、日本より研究が進んでいる。ホッピングマシンで無質量脚モデルと言えるのは1本足や2本足のもので、1980年代から走行を実現している。ただしホッピングロボットは飛び跳ねていないと倒れてしまうので歩行は出来ない。
トリ型モデル

トリ型ニ足歩行ロボット。胴体にモーターが配置され、足首と股関節にサスペンションが装備されている。足首にアクチュエータは無い。
鳥のような形をした二足歩行モデルである。胴体が前後に長く、前に曲がる第2関節を持つ脚を持つ。胴体と第3節の間に第4節を設定する場合もある。生物の鳥類には第4節がある。
胴体の両側に股関節があり、重心位置が股関節の位置とサジタル平面上で一致する。胴体の重心位置が股関節と一致するので、胴体に偏心モーメントが無い。したがってモーメント力を床面まで伝える必要が無いので、足首トルクを必要としない。そのためトリ型二足歩行ロボットでは足首のアクチュエータは省略されるか、小さいものでよい。末端重量を小さくできるので、第2関節、股関節のアクチュエータも小型化できる。そのため、脚部全体を軽量化することが可能である。脚が軽いので全身の重心位置が股関節の位置にほぼ一致し、地面を蹴る力をダイレクトに重心に伝えることができる。このためトリ型モデルは運動性能が良く、高速に走行することができ、エネルギーコストも良いといとされる。[18]
トリ型二足歩行ロボットは1990年頃に産業技術総合研究所、および信州大学で製作されている。2004年にはトヨタ・i-footが製作された。産業技術研究所のロボットはZMPによる歩行理論の実証を目指して、理論的に最も合理的なトリ型が採用された。信州大学のロボットは歩行ロボットとしては初めてサスペンションを装備した。足首と股関節にバネとダンパーを装着し、歩行から走行までモードレスに扱うことのできる独自の歩行理論の実証を目指した。
生物界ではトリ型歩行のほうが、直立二足歩行よりはるかに多く見られる。これは運動性がよく、エネルギー効率が高いためであると考えられている。実際ダチョウなど走鳥類は時速80km以上で長時間走ることができるとされている。これはチーターよりは遅いが、チーターの最高速は数秒間しか出ない。長距離ではダチョウの方が優れていると言われている。
恐竜型モデル
トリ型モデルの派生型として恐竜型モデルがある。恐竜型モデルはトリ型モデルの胴体をさらに前後に長くしたものである。尾に相当する部分で積極的に偏心モーメントを打ち消す。トリ型モデルよりさらに高速走行に向くと考えられているが、旋回するときに尾や首が邪魔になるので、屋内での応用範囲は狭いと見られている。これらのロボットは主にアメリカで研究されている。近年の恐竜の運動の研究には目覚しいものがあるが、歩行ロボットの研究成果も少なからず貢献している。
恐竜型モデルだと長い胴体でバランスを取ることが出来るので、静歩行でもかなりダイナミックな歩行が可能になる。静歩行なら運動方程式を扱う必要が無く、衝撃干渉機構などを組み込むことが容易にできる。制御に対する要求レベルも低く、歩行動作を停止しても転倒しないため安全性が高く、大型化が簡単に出来るので建設機械などへの適用も可能だろう。現時点では産業技術総合研究所で大型恐竜型歩行ロボットが開発されている[19]。
歩行の生成
歩行パターンによる歩行制御
現在主流なのは、重心位置を制御して歩行を制御する方法である。技術的にこなれた位置制御をベースに開発できるため、ほとんどの歩行ロボットがこの方法を採用している。ZMPを使った歩行制御も、重心位置を制御して歩行を実現している。
ロボットが歩く時の関節角の制御量を歩行パターンと言う。歩行パターンと言うと、古臭いパターン歩行を連想させるので、研究者によっては、歩行軌道や歩行制御量など言い方は様々である。かつては計算機の能力が足りなかったため、あらかじめ歩行パターンを生成しておき、ロボットでそれを再生することで歩行を実現しようとしていた。この方法は、計算値と実際のロボットの挙動が徐々にずれるためにうまくいかない。コンピュータの発達とともに挙動をリアルタイムでフィードバックし歩行パターンを生成することが出来るようになり、歩行が実現できるようになった。歩行パターンは制御モデルの運動方程式を立て、歩行の仕方となる拘束条件を入れ、運動方程式を解いて制御量を求める。
運動方程式とは、ある関節にどれだけ力を加えると、体の姿勢がどう変化し、重心位置とモーメント力がどうなる、という関係を表した数式である。運動方程式はリンクごとに相互作用を一つ一つ考慮して立てることも出来るが、歩行ロボットのようにいくつもリンク機構があると運動方程式を立てることは容易ではない。普通はオイラー・ラグランジュの運動方程式を使い、運動方程式を作る。
- オイラー・ラグランジュの運動方程式
- ddt∂L∂q˙i−∂L∂qi=0{displaystyle {frac {d}{dt}}{frac {partial {}L}{partial {}{dot {q}}_{i}}}-{frac {partial {}L}{partial {}q_{i}}}=0}

ラグランジアンL {displaystyle L }
L(q(t),q˙(t),t)≡T−V{displaystyle L({boldsymbol {q}}(t),{dot {boldsymbol {q}}}(t),t)equiv T-V}

T {displaystyle T }
V{displaystyle qquad V}
qi{displaystyle qquad q_{i}}
qi˙{displaystyle qquad {dot {q_{i}}}}
この方程式は、外力が加わらない限り、ポテンシャルエネルギーの変化量と運動エネルギーの変化量は等しいという、物理学の基本法則から導かれている。ロボットの運動は3次元なので、式は行列とベクトルを使ったもので構成される。これ以上は専門書を参考にされたい。

Eadweard Muybridgeによる。パターン歩行では、このような連続写真から得た動きを拘束条件とした。
歩行ロボットの自由度は多いので、ただ運動方程式を解いても歩行パターンは得られない。何らかの拘束条件を入れなければならない。生物のヒトやトリの歩行パターンやZMPがその拘束条件となる。ZMPでは、動力学的な重心位置が足裏の上に来るような関係式を立て、上の運動方程式と組合わせて連立方程式にして解く。方程式を解くと、どの関節を動かすとZMPがどこになるのか、あるいは、ZMPをある位置に持って行きたいときは、どの関節をどれだけ動かせばいいのかが、行列式によって表される。
歩行パターンは遊脚が床面から離れてから、再び床面に着くまでを一つのパターンとなる。この1パターン分の各アクチュエータの制御量を生成し、ロボットにステップ毎に入力すると理論的にはロボットは歩行することになる。コンピュータが高性能になった現代ではリアルタイムで歩行パターンが計算できるとはいうものの、複雑に変化する環境下で歩行パターンを随時計算するのはやはり難しい。標準的な歩行パターンを用意しておき、それに微妙なバイアスをかけることである程度の環境の変化に対応できるようにする、などの試みが行われている。
歩行パターンを使う歩行制御法ではどうしても運動方程式を解く必要があるが、ロボットの中に弾性体、いわゆるバネ系が存在するとオイラー・ラグランジュの運動方程式を解くことが出来なくなる。そのため、現在見られる歩行ロボットは極力バネ系が無いように設計される。サスペンションなどの衝撃緩衝機構が歩行ロボットに用いられないのはこのためで、歩行ロボットによる走行を難しくしている一つの要因となっている。
歩行パターンを用いない歩行制御
静歩行にしてもZMPにしても、歩行パターンを使う歩行は積極的に重心位置を制御することで歩行を行うが、重心位置を制御しない歩行制御法もある。アルゴリズム歩行、倒立振子モードによる歩行制御、イベント歩行、リズム運動を軌範とする歩行制御などがそうで、研究者により呼び方と制御方法は様々だが、重心位置を積極的に制御しない点では同じである。また、受動的に重心位置が変化する点ではパッシブウォーキングと親和性が高い。
竹馬型二足ロボットやトリ型二足歩行ロボットなど無質量脚モデルに近い二足歩行ロボットで適用例がある。アルゴリズムを使った歩行制御のメリットは、運動方程式を解く必要が無いので衝撃緩衝機構が付けられること、工作精度が低くてもいいので製造コストを抑えられること、運用中に発生する障害(転倒によるフレームの歪み、駆動系の不具合)、負荷の変動に対応できるので荷物の運搬や外力の作用に対応できること、などがある。また、エネルギー保存則に則した動作が可能になるため、歩行パターンを用いる歩行制御に比べ、格段にエネルギー効率を高くできる。
例としてあげると、左の動画は下の数式により得られた二足歩行の動作シミュレーションである。非常にシンプルな数式で歩行が生成されており、遊脚着地位置とキック力を恣意的にずらすことで方向転換や速度制御を行なっている。1つのベクトルで歩行を制御できるので、操縦桿とアクセル・ブレーキでロボットをコントロールすることが可能になっている。
[20]
 メディアを再生する
メディアを再生するアルゴリズムによる二足歩行の例 [21]
p=qA+q˙B−vC{displaystyle p=qA+{dot {q}}B-vC}

ここで
p=(px,py,pz,pt){displaystyle p={begin{pmatrix}p_{x},&p_{y},&p_{z},&p_{t}end{pmatrix}}}

着地位置ベクトル。着地点のxy座標、キック力、軸足交換タイミング
q=(qx,qy,qz,qt){displaystyle q={begin{pmatrix}q_{x},&q_{y},&q_{z},&q_{t}end{pmatrix}}}

重心位置または胴体等の中心位置の座標ベクトル
q˙{displaystyle {dot {q}}}

qの時間微分、つまり速度。
v{displaystyle v,}

方向指示ベクトル。
A,B,C{displaystyle A,B,C,}

係数マトリクス
なお、本稿では文章構成上、歩行パターンを用いる歩行制御(重心位置を制御する歩行制御)、歩行パターンを用いない歩行制御(重心位置を制御しない歩行制御)に分けられた文脈となっている。近年、パッシブウォーキングに関するが研究が進んでおり、従来の歩行制御法とのカテゴライズが形成されつつあるも、この分け方が必ずしもオーソライズされた概念ではないことは注記しておく。
二足歩行ロボットのハードウエア
二足歩行ロボットのハードウエアはフレームとアクチュエータ、制御系、電源で構成される。以前は制御系と電源は外部に置くことが多かったが、バッテリーと制御機器の小型化によりロボット本体に搭載することが可能になった。二足歩行ロボットの構成要素は産業用ロボットと大差無いが、歩行ロボットは産業用ロボットと違い、自動車などと同じ移動体であり、設計には自動車やオートバイの考え方に似たところがある。すなわち、軽量で大出力なほど有利であり、バネ下重量(歩行ロボットでは脚の質量がこれに相当する)や末端重量が少ないほど良い。重心位置が運動特性に大きな影響を及ぼす点も似ている。
二足歩行ロボットは現在研究開発途上のものであり、これが標準的な構造と言えるものは無いが、現在の傾向やその経緯について簡単に解説する。
フレーム
二足歩行ロボットのフレームは制御モデルのリンク(節)に相当する。現在主流のZMPを軌範とする歩行制御を行う場合、位置制御がベースとなるため、制御モデルのリンクは完全剛体と仮定されるので、実際に製作されるロボットのフレームにも高い剛性が求められる。また精度も高いものが要求され、低い工作精度だと制御が困難になることがある。当然、転倒したぐらいでは歪まない強度が要求される。以前は軽量化のためアルミニウムが使われることがあったが、近年は剛性と加工性を重視してスチールが用いられることが多くなってきた。ちなみに産業用ロボットでも剛性を重視して鋳鋼や鋼板が用いられている。剛性だけで言えば炭素繊維強化プラスチックなどの複合素材が優れているが、加工が非常に難しいため、あまり用いられない。
軽量化のため外骨格構造が取られることが多いが、転倒時に歪みやすいので内骨格構造が採用されることもある。内骨格構造には艤装がしやすく、修理が容易というメリットもある。
アクチュエータ
二足歩行ロボットのアクチュエータにはサーボモーターが用いられる。油圧、空圧、人工筋肉などが用いられることもあるが例は少ない。サーボモーターは高速回転するものなので、減速機で回転数を落としトルクを上げる必要がある。減速機には歯車が使われるが、二足歩行ロボットには遊星歯車かハーモニックドライブが使われる。ハーモニックドライブは楕円と真円の差動を利用した減速機で、小型軽量高効率で多くの歩行ロボットに使われている。ただし大変高価である。
サーボモータを駆動するにはサーボアンプが必要になる。産業用ロボットも含めてロボットのサーボアンプには、普通、ロバスト性を高めるためにPWMドライバが使われる。PWMとはモーターの最大電流を+と-のパルスで供給し、モーターを常に最大負荷で使う方法である。サーボアンプはパワーデバイスであり、熱容量の関係から、汎用品は大きく重い。ロボットに搭載するには特注品を依頼するか自作する必要がある。
ロボット競技大会
小型(10~30cm程度)の二足歩行ロボットについては、特に日本において個人や小規模な団体での研究が盛んである。これはロボカップやROBO-ONEといったロボット競技大会によるところが大きい。2011年2月24〜26日には、二足歩行ロボットのフルマラソン大会が世界で初めて行われ、トップの完走時間は54時間57分50秒であった[22]。
主な二足歩行ロボット
ヴァルキリー(アメリカ合衆国・アメリカ航空宇宙局(NASA)開発の二足歩行ロボット。[23][24][25][26][27][28]
- WABOT-1(早稲田大学: 世界初の電気制御二足歩行ロボット)
ASIMO(本田技研工業):実用化を視野に入れて開発された[29]
- E2-DR(本田技研工業):カナダ・バンクーバーで2017年9月に開催されたロボット産業関連の展示会「IROS 2017」で発表された災害救助ロボット(プロトタイプ)[30]。
RHP(Robust Humanoid Platform)(川崎重工業,東京大学情報システム工学研究室(JSK)等の共同開発):東京ビッグサイトにて2017年11月29日から2017年12月2日まで開催された国際ロボット展「iREX 2017」で発表されたプロトタイプ・ロボット(バージョン4)[31]。
Kaleido(カレイド)(川崎重工業,東京大学情報システム工学研究室(JSK)等の共同開発):東京ビッグサイトにて2018年10月17日から2018年10月21日まで開催された国際ロボット展「WRS 2018」で発表されたプロトタイプ・ロボット(バージョン5)[32]。
HRP-2(川田工業,産業技術総合研究所等の共同開発)[33]
HRP-2改(川田工業,産業技術総合研究所等の共同開発):DARPAロボティクス・チャレンジ2015年6月本戦(23チーム中)10位[34]
- JAXON(東京大学開発):DARPAロボティクス・チャレンジ2015年6月本戦(23チーム中)11位[35][36]
HRP-3(川田工業,産業技術総合研究所等の共同開発)[37]
HRP-4(川田工業,産業技術総合研究所等の共同開発))[38]
HRP-5P(川田テクノロジーズ,本田技研工業,産業技術総合研究所等の共同開発)[39][40]
KHR-1(近藤科学):愛好家向けに市販された
i-SOBOT(タカラトミー):家庭用に市販された。廉価ながらも17自由度を備えていた。
QRIO(ソニー):試作機は完成度が比較的高かったものの、発売されず。
トヨタ・i-foot(トヨタ自動車):搭乗型二足歩行ロボットで愛・地球博で公開された。
T-HR3 (ロボット)(トヨタ自動車):2017年11月29日から12月2日まで東京ビッグサイトで開催された2017国際ロボット展に出展された[41][42][43]。
LAND WALKER(榊原機械):搭乗型だが厳密には二足歩行ではない。
HUBO+(DRC-HUBO)(大韓民国・韓国科学技術院 (KAIST)):DARPAロボティクス・チャレンジ2015年6月本戦(23チーム中)1位で優勝[44]。
WALK-MAN(Whole-body Adaptive Locomotion and Manipulation)(イタリア共和国・イタリア技術研究所(IIT)):DARPAロボティクス・チャレンジ2015年6月本戦(23チーム中)17位。[45][46][47][48][49][50]
iCub(イタリア共和国):イタリア技術研究所(IIT)[51]を中心に研究・開発がおこなわれている子供型二足歩行ロボット[52]。設計はオープンソースとなっており、如何様にもカスタマイズ可能[53]。
REEM-C(スペイン・バルセロナ):PAL Robotics[54]にて開発された身長165cm、体重80kg、全44自由度の二足歩行ロボット(2013年7月発表)。[55][56][57]
- TALOS(スペイン・バルセロナ):PAL Roboticsを中心に研究・開発がおこなわれている身長175cm、体重95Kg、全32自由度の二足歩行ロボット。[58][59][60]
TORO(Torque Controlled Humanoid Robot)(ドイツ連邦共和国・ドイツ航空宇宙センター):宇宙空間で宇宙飛行士と共同作業を行なう目的で開発された二足歩行ロボット(2013年3月発表)。身長174cm、体重76.4kg。[61][62][63][64][65]
FEDOR(Final Experimental Demonstration Object Research)(ロシア連邦):Android Technics[66]とAdvanced Research Foundationにて開発された二足歩行ロボット(2016年10月発表)。[67][68][69]
- (ロシア民間防衛問題・非常事態・自然災害復旧省から委託された)プロジェクト全体の総開発予算(2014年度開始から2019年度終了の五カ年計画)として3億ルーブル(日本円換算:約5億円)を計上。開発予算1800万USドル(日本円換算:約20億円)のボストン・ダイナミクス社のアトラスより格段に安い[70][71]。
ロシア国営コングロマリット「ロステク(Rostec)」[72]傘下の「TsNIITochMash」[73]を中心に、宇宙空間で宇宙飛行士と共同作業を行なう目的で開発された。身長180cm、最大重量160kg。型式番号は「AR-705RH」。[74][75][76]
- 2021年に就役予定の新型宇宙船フィディラーツィヤにFEDORの後継機TESTER(ロボノート同様、上半身だけの仕様)[77]2体が搭乗して宇宙ミッションを行う予定であったが、(計画の前倒しにより)2019年のソユーズ-2.1aロケットによるISSへの無人補給ミッションの打ち上げに後継機TESTER2体も搭乗、ISSに向かう計画(2019年2月8日以降、6人の宇宙飛行士たちが『ガガーリン宇宙飛行士訓練センター』にて遠隔操縦訓練を実施している)[78][79][80]。
先行者(中華人民共和国 ・長沙市・国防科学技術大学)- Walker(中華人民共和国 ・UBTECH[81]):正式名称は「Intelligent Humanoid Service Robot」。身長145cm、体重77kg、全36自由度の二足歩行ロボット。2019年1月8日から2019年1月11日までアメリカ・ラスベガスで開催された「CES 2019」に出展された[82][83][84]。
PETMAN(アメリカ合衆国・ボストン・ダイナミクス社)[85]
アトラス(アメリカ合衆国,ボストン・ダイナミクス社)[86][87][88][89]
- Digit(アメリカ合衆国・オレゴン州・オレゴン州立大学,Agility robotics社[90]):2020年度内に量産・納品を開始する予定の新型二足歩行ロボット(2019年2月26日発表)[91][92]。
- Gynoid
Nao(フランス ・Aldebaran Robotics社)
Romeo(フランス ・Aldebaran Robotics社、fr:Cap Digital)[93]
- ASRA C1(アスラテック)
PALRO(富士ソフト)
S-1 (SCHAFT):DARPAロボティクス・チャレンジ2013年12月予選首位通過(2015年6月本戦欠場)
Sota (ロボット)(ヴイストン,日本電信電話,NTTデータ等の共同開発)
ロボゼロ(デアゴスティーニ・ジャパン)
ロビ(デアゴスティーニ・ジャパン)
PLEN(プレンプロジェクト)
関連項目
- 人造人間
- アンドロイドサイエンス
- リアルロボット
- 不気味の谷現象
ロボジー - 「二足歩行ロボットの開発が間に合わず、老人にロボットの着ぐるみを着てもらって窮地を凌ごうとする」という映画作品。
脚注
^ 前島梓「日曜日の歴史探検:ASIMOまで駆け抜けたホンダのロボット開発」、ITmedia、2009年06月14日、[1]
^ 荒井裕彦「ロボットの機構と制御 -ホンダ・ヒューマノイドに関する考察-」、映像情報メディア学会誌,Vol.57,No.1 (特集 ロボット),pp.50-52,2003.
^ 「Why Did Honda Build a Humanoid Robot That Meets With the Vatican's Approval?」,The Wall Street Journal — Sep 4, 2001 (ホンダがロボットを発表するにあたって、バチカンのローマ法王に了解を得たエピソードがウォールストリートジャーナルで記事になっている。ヒューマノイドを創造する行為は、キリスト教世界においては神を冒涜する行為に解釈される可能性があった。ホンダの開発チームは、キリスト教徒の反感を避けるために事前に法王の意見を仰いだ。法王は、ロボットの開発に肯定的な意見を述べられたため、その後欧米でも歩行ロボットの開発が一般化した。)
^ ロボット開発のプロローグ、本田技研工業株式会社、[2]
^ 軽量でスリムな働く人間型ロボット研究開発用プラットフォーム、川田工業株式会社、“アーカイブされたコピー”. 2010年9月18日時点のオリジナル[リンク切れ]よりアーカイブ。2010年9月16日閲覧。
^ 日本のロボット産業の動向 、JETRO、[3]
^ 鈴木一義、古田貴之「江戸時代からの古き技術と現代のロボット研究「からくり人形とロボット」」SciencePortal(レポート)、科学技術振興機構、2006年6-7月、http://scienceportal.jp/reports/robbot/<meta />。梅谷陽二『ロボットの研究者は現代のからくり師か?』オーム社、2005年3月、ISBN 9784274200250 。
^ “America, Welcome Your Robot Overlords” (English). FOXNews.com. 2008年10月11日閲覧。
^ 中村伸生「ロボット・テクノロジーがSFアニメを超える日」リクナビNEXT・Tech総研、2005年1月26日(富士キメラ総研、足立吉弘へのインタビューに基づく)、http://rikunabi-next.yahoo.co.jp/tech/docs/ct_s03600.jsp?p=000456。清谷信一「機と字とキャラクター— 何故無機質なものにシンパシーを感じるのか」東京財団キャラクター創造力研究会第3回発表要旨、2005年7月28日、http://www.tkfd.or.jp/division/public/culture/charaken2005/kiyotani2005.shtml
^ レスキューロボット・極限作業ロボットに関する議論、[4]
^ 極限作業ロボット・大型プロジェクトでの開発の現状、鷺沢忍、日本機械学會誌 93(865)、989-993、1990-12-05、[5]
^ レスキューロボット・極限作業ロボットに関する議論、[6]
^ 国産ロボット技術-原発事故の想定怠り出遅れ、日経ヴェリタス、2011年05月08日 [7]
^ 「日本のロボット利用に関する現状と課題 〜福島第一原発における災害用ロボット活用事例から読み解く〜」、IEEセミナー、2011年8月4日、[8]
^ 再検証「ロボット大国・日本」、大塚実,@IT MONOist、[9]
^ パラグライダーから無人飛行機へ - ジャーナリスト小泉成史の金沢工業大学インタビュー
^ Andy Ruina,「Passive Dynamic Walking」 Human Power and Robotics Lab, Theoretical and Applied Mechanics, Cornell Univ. リンク先に1888年のおもちゃの特許が記載されている。[10]
[11]
^ 「生物と運動」 R.マクニール.アレクサンダー 1992 日経サイエンス社 ISBN 4-532-52017-7
^ 産業技術総合研究所プレスリリース「恐竜型ロボットの開発に成功」2005年3月4日、 http://www.aist.go.jp/aist_j/press_release/pr2005/pr20050304/pr20050304.html。このロボットが静歩行、動歩行のどちらを行っているかは公表されていない。
^ Biped Robot Simulator ver.1.43 "Archaeopteryx", ロボット工学ソフトウェアライブラリCD-ROM, 日本ロボット学会誌 Vol.14, No.1
http://staff.aist.go.jp/h.arai/robotics/jrsj96_sof_intro.html, http://staff.aist.go.jp/h.arai/robotics/jrsj96_sof_list.html
^ 二足歩行シミュレータ、ベクターソフトウェアライブラリ、http://rd.vector.co.jp/soft/winnt/edu/se486210.html
^ 世界初、二足歩行ロボットによるフルマラソン「ろぼまらフル」に挑戦!
^ Valkyrie: NASA's Superhero Robot
^ NASA Space Robotics Challenge Task 1 with Valkyrie - YouTube
^ Nasa Valkyrie Robot Demo - YouTube
^ NASA Help Training Valkyrie Robots to Go to Mars - YouTube
^ Valkyrie Autonomous Path Planning over Curved Uneven Path - YouTube
^ Valkyrie Autonomously Crossing Stepping Stones - YouTube
^ ホンダ企業CM ASIMO2008 「DINNER]編
^ Experimental Legged Robot for Inspection and Disaster Response - YouTube
^ 新型ヒューマノイドからロボット活用の未来を探る XYZ 川崎重工業株式会社 川崎重工業、2017年11月1日閲覧
^ ヒューマノイドロボット名称募集 川崎重工 ロボットビジネスセンター 川崎重工業、2017年11月29日閲覧
^ Navigation of humanoid robot HRP-2 based on View Sequence (2005)
^ 災害対応 ヒューマノイドロボット HRP-2改【ダイジェスト版】
^ 災害対策用ヒューマノイドJAXON @2015国際ロボット展
^ Robot Motion Generation for Walk and Skateboard and Roller Skate - YouTube
^ Humanoid Robot HRP-3 Experiments on Multifinger Hand Grasp based on Visual Recognition
^ HRP-4のデモ
^ 【HRP-5P】Humanoid Robot【産総研公式】 - YouTube
^ 【HRP-5P】重量のある実物の資材で建設作業に成功【産総研公式】 - YouTube
^ T-HR3映像 - YouTube
^ T-HR3技術説明全体編 - YouTube
^ Toyota Gets Back Into Humanoid Robots With New T-HR3 - IEEE Spectrum spectrum.ieee.org | 2017年11月22日閲覧
^ Dynamic Walking Control of DRC HUBO
^ WALK-MAN - Walk-Man
^ WALK-MAN Team Built Brand New, Highly Custom Robot for DRC Finals - IEEE Spectrumspectrum.ieee.org |2015年6月3日閲覧
^ IIT robot WALKMAN ready for the DARPA Robotics Challenge 2015 - YouTube
^ New WALK-MAN Robot Is Slimmer, Quicker, Better at Quenching Your Flames - IEEE Spectrumspectrum.ieee.org |2018年2月22日閲覧
^ WALK-MAN operating in a damaged building - YouTube
^ The WALK-MAN project - YouTube
^ Istituto Italiano di Tecnologia
^ Dynamic Interaction Control lab's 2018 Year In Review - YouTube
^ iCub.org - an open source cognitive humanoid robotic platform
^ PAL Robotics
^ REEM-C - PAL-ROBOTICS
^ REEM-C Technical Specifications (PDF)
^ Introducing REEM-C - YouTube
^ TALOS - PAL-ROBOTICS
^ TALOS Humanoid Now Available from PAL Robotics - IEEE Spectrum spectrum.ieee.org | 2017年3月7日閲覧
^ TALOS, the High Performance Biped Robot - YouTube
^ DLR - Institute of Robotics and Mechatronics - Toro
^ The robot is complete – arms and hands for TORO, the walking machine
^ Multi-Contact Balancing of Humanoid Robots in Confined Spaces Utilizing Knee Contacts - YouTube
^ Multi contact Balancing For Torque -Controlled Humanoid Robots - YouTube
^ Video Friday TORO Humanoid Robot Learning to Balance, and More - IEEE Spectrumspectrum.ieee.org |2018年8月31日閲覧
^ НПО Андроидная Техника НПО Андроидная Техника
^ “Космический Аватар на что способен новый робот-спасатель FEDOR - Армия и ОПК - ТАСС”. tass.ru. 2016年10月11日閲覧。
^ russia Android robot FEDOR proves jack of all trades in latest test - YouTube
^ Можно ли доверять роботу Фёдору Эксклюзивные испытания WarGonzo - YouTube
^ “Parts Suppliers Are Boycotting Russia’s Pistol-Shooting Android”. futurism.com. 2019年3月1日閲覧。
^ “Евгений Дудоров готовим робота Федора к полету в космос - РИА Новости, 27.02.2019”. ria.ru. 2019年2月27日閲覧。
^ Rostec
^ Акционерное общество «Центральный научно-исследовательский институт точного машиностроения» (АО «ЦНИИТОЧМАШ»)
^ “Аватар для МЧС как создавали робота-спасателя по имени Федор Технологии и медиа Журнал РБК”. rbc.ru. 2017年12月21日閲覧。
^ russia Cyber cosmonaut dubbed 'robo-Garagin' unveiled - YouTube
^ Как робот Федор сдавал экзамены - YouTube
^ Гидравлический торсовый робот - YouTube
^ tass Science & Space - Roscosmos to step up research into human astronaut interaction with robots tass.com | 2019年2月12日閲覧
^ These Gun-Toting, Weight-Lifting Russian Robots Might Fly to Space in 2019space.com | July 23, 2018
^ Федор готовится к полету на ПТК "Федерация" - YouTube
^ UBTECH Robotics - Humanoid intelligent & programmed robots for family
^ UBTECH Robotics Presents Walker - YouTube
^ UBTECH's Walker Robot - YouTube
^ UBTECH Shows Off Massive Upgrades to Walker Humanoid Robot - IEEE Spectrum spectrum.ieee.org | 2019年1月8日閲覧
^ PETMAN
^ Atlas, The Next Generation - YouTube
^ What's new, Atlas - YouTube
^ Getting some air, Atlas - YouTube
^ Parkour Atlas - YouTube
^ Agility Robotics
^ Meet Digit — Agility Robotics agilityrobotics.com | 2019年2月26日閲覧
^ Meet Digit: The Newest Robot From Agility Robotics (PDF)
^ ROMEO PROJECT PRESENTATION (Romeo robot)
出典
- Asada, H. and Slotine, J.-J. E. (1986). Robot Analysis and Control. Wiley. ISBN 0-471-83029-1.
- Arkin, Ronald C. (1998). Behavior-Based Robotics. MIT Press. ISBN 0-262-01165-4.
- Brady, M., Hollerbach, J.M., Johnson, T., Lozano-Perez, T. and Mason, M. (1982), Robot Motion: Planning and Control. MIT Press. ISBN 0-262-02182-X.
- Horn, Berthold, K. P. (1986). Robot Vision. MIT Press. ISBN 0-262-08159-8.
- Craig, J. J. (1986). Introduction to Robotics: Mechanics and Control. Addison Wesley. ISBN 0-201-09528-9.
- Everett, H. R. (1995). Sensors for Mobile Robots: Theory and Application. AK Peters. ISBN 1-56881-048-2.
- Kortenkamp, D., Bonasso, R., Murphy, R. (1998). Artificial Intelligence and Mobile Robots. MIT Press. ISBN 0-262-61137-6.
- Poole, D., Mackworth, A. and Goebel, R. (1998), Computational Intelligence: A Logical Approach. Oxford University Press. ISBN 0-19-510270-3.
- Russell, R. A. (1990). Robot Tactile Sensing. Prentice Hall. ISBN 0-13-781592-1.
- Russell, S. J. & Norvig, P. (1995). Artificial Intelligence: A Modern Approach. Prentice-Hall. Prentice Hall. ISBN 0-13-790395-2.
外部リンク
- Sony Japan QRIO
- HONDA ASIMO SPECIAL SITE
- 人間型ロボットHRP-2(Promet)川田工業株式会社
- トヨタ パートナー・ロボット
- テムザックのロボット開発技術
- WABOT -WAseda roBOT(早稲田大学ヒューマノイド研究所)
- ロボ・ガレージ
- ROBO-ONE OFFICIAL SITE
- ヒューマノイドPALRO(パルロ)
- ヒューマノイドDARWIN-OP Robotis社製 日本バイナリー
- UBTECH Robotics - Humanoid intelligent & programmed robots for family
- Boston Dynamics is changing your idea of what robots can do. Boston Dynamics
- PAL Robotics
- DLR - Institute of Robotics and Mechatronics - Toro
- iCub.org - an open source cognitive humanoid robotic platform
- WALK-MAN - Walk-Man
- Aldebaran Robotics
- Android Technics
- Agility Robotics
Meet Digit: The Newest Robot From Agility Robotics (PDF)
『人間らしく歩行するロボットの擬人化設計』-(国立台湾大学卒業 工学博士) 龍華科技大学 非常勤助教授 江 明勲 (PDF)


